Vertical Logger (MSCL-V)
 The vertically-orientated Multi Sensor Core Logger (MSCL-V) is ideal for studying the properties of the sediment-water interface or for laboratories (especially offshore) where space is at a premium.
The vertically-orientated Multi Sensor Core Logger (MSCL-V) is ideal for studying the properties of the sediment-water interface or for laboratories (especially offshore) where space is at a premium.
The MSCL-V consists of two main subsystems:
- the mechanical assembly and
- the electronics/computer console
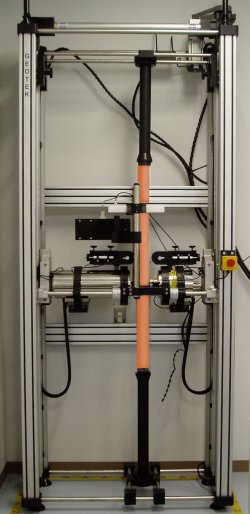
The mechanical assembly consists of a rugged anodised aluminium framework, suitable for use in a shore-based or shipboard laboratory environment, and contains the core section support framework, the sensor tracking system and the sensor systems themselves. Some subsystem electronics are housed within the unit.
The MSCL-V mechanical assembly accommodates core sections of up to 1500 mm long with overall diameters (including end caps) of between 50 mm and 150 mm. The core section stands on a plinth (which needs an adapter for each core size used) and is secured at the top using a sliding clamp arrangement.
A sensor platform moves, under motor power, either in manual or computer control along the complete length of the core section enabling the sensors to acquire data from the complete length of the core section. The normal logging direction is from top to bottom. The sensor platform normally contains the systems required for measuring P-wave velocity, gamma density, magnetic susceptibility, and electrical resistivity.

The sensor platform traverses the length of the core section using a ball screw assembly driven by a belt and pulley arrangement connecting it to a servo motor which is driven by a digital servo amplifier, receiving control signals from the computer. The platform is guided along rails ensuring complete stability of the relatively heavy sensor platform (approximately 100 kg). To ensure sufficient power and speed is available we have used a platform weight in excess of 200 kg for design purposes and assumed a normal operating speed of 5m/min. This design specification ensures that the system will continue to function normally in a moving environment (i.e. on board a ship).
Limit switches are incorporated to prevent accidental excessive travel; drive belt integrity sensors and an emergency stop button are also provided. Cables to the moving platform are housed within a cable chain ensuring safe operation. A fail-safe braking system prevents the platform falling under its own weight in the event that power is lost to the motor. A manual override ensures that the user can park the sensor platform in its home position (at the base of the instrument) in the event of a complete power failure.
The entire system is mounted on shock absorbing feet (to limit vibration effects on board ships) and incorporates eyebolt tie-down points allowing the unit to be securely fixed to the ship’s structure ensuring safe usage onboard a moving vessel.